SERVICE
Spiral MFA
Automatic patrol solution
In response to your installation environment, Spiral provides total solutions from autonomous flight to image analysis

- Drone
- Automatic charging station

- Periodically automatic patrol
- Video shooting

- Image analysis(Option)
Operation flow
-
1
Flight path design
Set the flight path with the Web app
-
2
Place markers
Put markers at the construction site
-
3
Equipment setting
Set the drone and automatic charging station
-
4
Automatic patrol flight
Push the take-off bottom on the Web app
-
5
Confirm the patrol result
You can check on-site progress using the Web app
USE CASE

Dam audit corridor
- Instrument check
- Abnormality detection
- Confirmation of the entire corridor

Shield tunnel
- Belt conveyor meandering monitoring
- Confirmation of overall tunnel condition

Mountain tunnel
- Confirmation of tunnel face condition
- Belt conveyor meandering monitoring
- Confirmation of overall tunnel condition
FEATURE

Capable of autonomous flight without radio
All you need is the drone and markers. Even though no GPS environment, drone can fly autonomously by direction indications embedde in markers

Efficiency without drone operation
Fully automated operation eliminates the need to manually control the drone at construction sites. It is possible to improve work efficiency while avoiding the dangers of inspection work

Flight route making and image analysis
Using the web application, it is possible to design flight paths, take off instructions, display the current location, and display inspection results. You can centrally manage the progress management and monitoring of construction work
SERVICE
Spiral MFA compatible devices
Spiral provides the drone attaching MFA on to the drone itself that is manufactured by Flare Dynamics Pte Ltd.

DHAN
Drone
Suitable for narrow space flight
Small autonomous flight drone equipped with MFA controller. Automatic charging station included (see video and specs for details)
DHAN
Drone
Suitable for narrow space flight
Small autonomous flight drone equipped with MFA controller. Automatic charging station included (see video and specs for details)
| Name | DHAN |
|---|---|
| Size | W270 x D280 x H90mm *with propeller guards |
| All Up Weight | 630g *with Battery |
| Battery | Li-Po 4 cell 14.8V-3000mAh |
| Flight time | Up to 15min |
| Payload(POV) | 1920×1080p30 (SD/HD/FHD) HFOV – 155°, VFOV – 117° |
| GPS | No |
| Yaw correction sensors(Single point lidar) | Range:4 cm~4m Resolution:1 mm FOV:15°~27° |
| Altitude sensor(Single point lidar) | Range: 0.2 – 50m Resolution: 1cm Accurracy: ±10cm |
| Obstacle detection sensors(Distance sensor) | Range:4 cm~4m Resolution:1 mm FOV:15°~27° |
| Camera for maker detection | 640 x 480 |
| Propeller guards | YES |
| Autonomous Flight System(AFS) | AFS:MarkFlex®︎Air(MFA) Controller Type:TS-1 Software version:T-App ver.2 |
| Autonomous Charging | YES |

Rebecca
Drone
Suitable for acquisition of high-performance images and videos
Middle size autonomous flight drone equipped with MFA controller.
Rebecca
Drone
Suitable for acquisition of high-performance images and videos
Middle size autonomous flight drone equipped with MFA controller.
| Name | Rebecca |
|---|---|
| Size | W650 x D650 x H300mm *with propeller guards |
| Flight Controller | Pixhawk2 |
| Firmware | Arducopter 3.6.2-rc2 |
| MFA controller | Raspberry Pi3 B+ |
| All Up Weight | Up to 3kg |
| Battery | Li-Po 4cell14.8V-6000mAh |
| Flight time | Up to 10min |
| Grand Control Station | Insta360 CINAKGP/A 5.7k/30, 25, 24,4k/303k/100 |
| Payload(POV) | Mission Planner Ver1.3.61 |
| GPS | No |
| Yaw correction sensors(Single point lidar) | Range: 0-40m Accuracy: +/- 2.5cm at distances greater than 1m |
| Obstacle detection sensors(Distance sensor) | Resolution:1 mm Range:4 cm~4m FOV:15°~27° |
| Altitude sensor(Single point lidar) | Up to 50m |
| Camera for maker detection | Resolution:1080p、720p Video:640 x 480p90 |
| Propeller guards | YES |
| Autonomous Charging | NO |
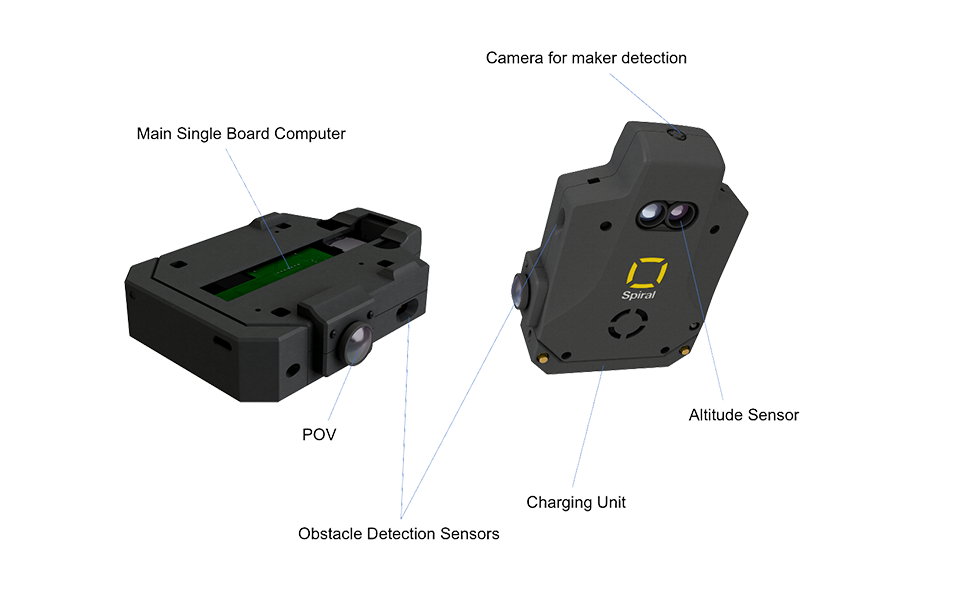
MFA Controller
Controller
Controller(Built-in autonomous flight control software) can be installed on to the current drone and makes possible to fly autonomously under non GNSS environment.※Controller can be installed on your drone. Please contact us for more detail information.
MFA Controller
Controller
Controller(Built-in autonomous flight control software) can be installed on to the current drone and makes possible to fly autonomously under non GNSS environment.※Controller can be installed on your drone. Please contact us for more detail information.
| Name | TS-1 | TS-2 |
|---|---|---|
| Size | W107 x D109 x H26mm | W80 x D117 x H26mm |
| Weight | 150g | 130g |
| Main SBC | Rasberry Pi 3A+ | Jetson TX2 NX |
| IMU | NA | Bosch BNO055 Intelligent 9-Axis Absolute Sensor |
| Yaw correction sensors(Single point lidar) | Range:4 cm~4m Resolution:1 mm FOV:15°~27° |
Range:10 cm~7m Accuracy: ±6cm |
| Altitude sensor(Single point lidar) | Range: 0.2 – 50m Resolution: 1cm Accurracy: ±10cm |
NA |
| Obstacle detection sensors(Distance sensor) | Range:4 cm~4m Resolution:1 mm FOV:15°~27° |
Range:4 cm~4m Resolution:1 mm FOV:15°~27° |
| Camera for maker detection | 640 x 480 FOV – 62° |
3280 × 2464 FOV – 77° |
| Camera for vision sensing | NA | 3280 × 2464 FOV – 77° |
| Payload(POV) | 1/4 Color sensor 1920×1080p30 (FullHD) HFOV – 155°, VFOV – 117° |
1/2.8 Color sensor 1920 × 1080p30(FullHD) FOV – 143° ASS(Auto Sensing Support) |
Web application
MFA tracker automatic patrol
Automatic flight start
Drone can autonomously fly with only setting flight time (It is possible to push the button manually). It makes possible to automate the inspection work at dangerous place.
Make flight route
You can design your flight path and check your current position. You can freely set the position you want now. Create an optimal flight path.。
Progress confirmation・report
You can confirm progress of construction site at your office using videos and pictures taken by drone. You can centrally manage the work progress and monitoring.
Video analysis

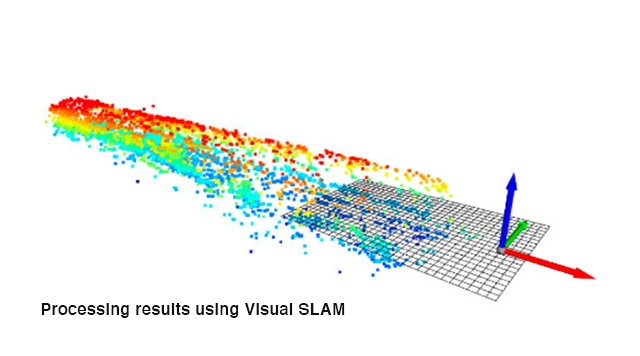
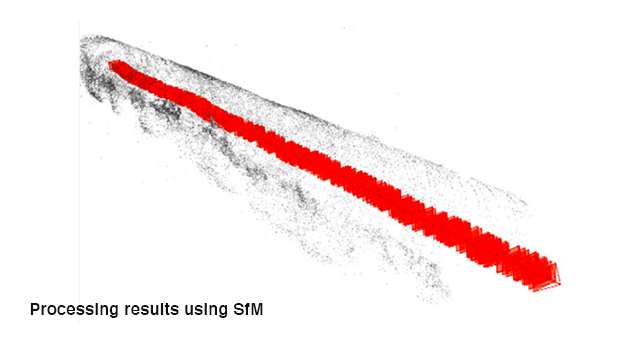
Temporary material detection/creation of 3D point cloud data
By analyzing the video taken by the drone during flight, it is possible to detect temporary material and send an email to the administrator as necessary. You can also use Visual SLAM and SfM to create 3D point cloud data of the tunnel.
USE CASE
Introduction flow
-
1
Consultation on considering introduction of indoor autonomous patrol drone
-
2
Hearing about usage, flight environment, request and etc.
-
3
Proposal for solution
-
4
Contract
-
5
Delivery
-
6
Continued after-sales support.
We provide solutions to solve the customers challenges.
Please feel free to contact us.